今天小辫辫要带你利用带参数例行程序画一个小圈圈,把你圈住和我一起学习
(●ˇ∀ˇ●)
坐稳啦,小辫辫要带你开车咯
<~嘟~嘟~嘟~>
在例行程序声明中可以加入参数,在调用该程序时需要输入对应参数;
参数包括四种:
> 正常情况下,参数仅用作输入,同时被视作程序变量,改变此变量,不会改变对应参数的值;
> 若为INOUT(输入输出)参数,对应参数必须为变量或可变量;
> 若为VAR(变量)参数,对应参数必须为变量;
> 若为PERS(可变量)参数,对应参数必须为可变量;
INOUT(输入输出), VAR(变量), PERS(可变量)类型参数,若在程序中进行了修改,则等同于修改了参数本身;
> 若参数是可选的,在程序声明的参数列表中可忽略。可选参数用反斜线(\)+参数表示,如下例子所示;
例1:PROC test1 (num Num_X \num Num_Y)
……
ENDPROC
> 两个或多个可选参数之间可能会互相排斥,也就是说同一程序调用中只可能出现其中一个,这一情况通过在参数之间加竖线(|)表明,如下例子所示;
例1:PROC test2 (\num Num_Rx | num Num_Ry)
……
ENDPROC
利用带参数例行程序画一个小圈圈步骤:
(1)新创建一个例行程序;
(2)设定程序名称(canshuCX),添加参数;
(3)为该程序添加一个robtarget类型,模式为输入/输出的参数(注:此处画圆是利用偏移指令搭配使用,所以只需一个robtarget型的输入/输出参数即可);
1)点击 添加 → 添加参数;
2)修改名称为“Cir_Pos” → 确定;
3)修改右边数据:
a)点击num → 找到“robtarget”并选中 → 确定
b)点击In → 选择 输入/输出
4)这样robtarget型的输入/输出参数就创建好了,如图1所示;
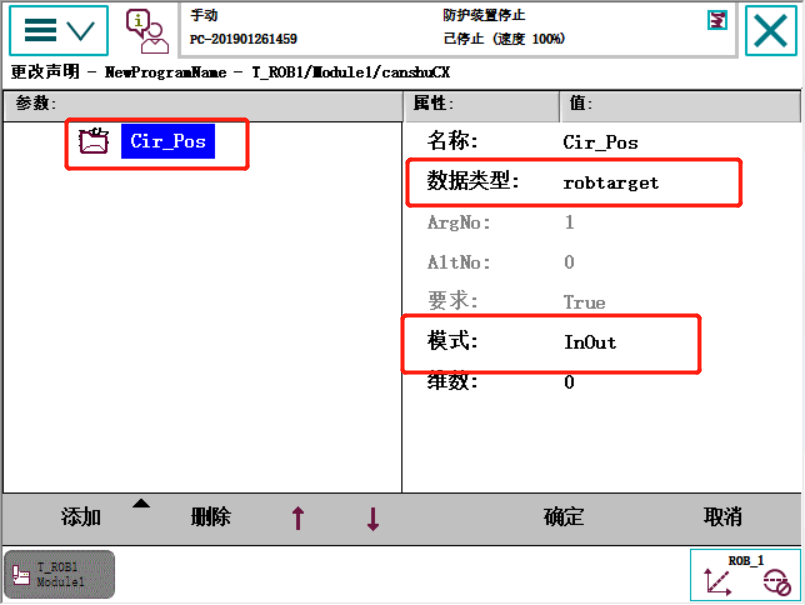
图1
(4)点击确定;
(5)确保参数设定正确之后,点击确定,这样带参数的例行程序就创建出来了,如图2所示;
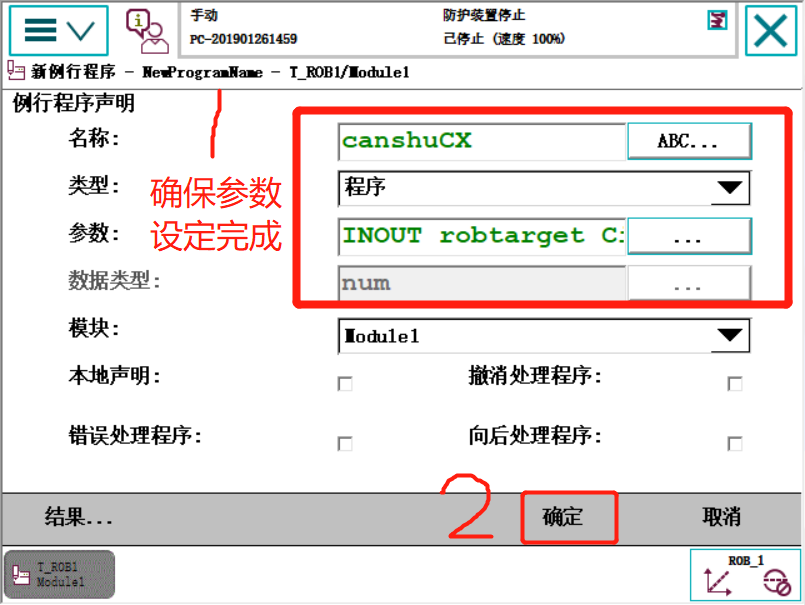
图2
(6)打开canshuCX程序,对其进行编写如图3所示内容:
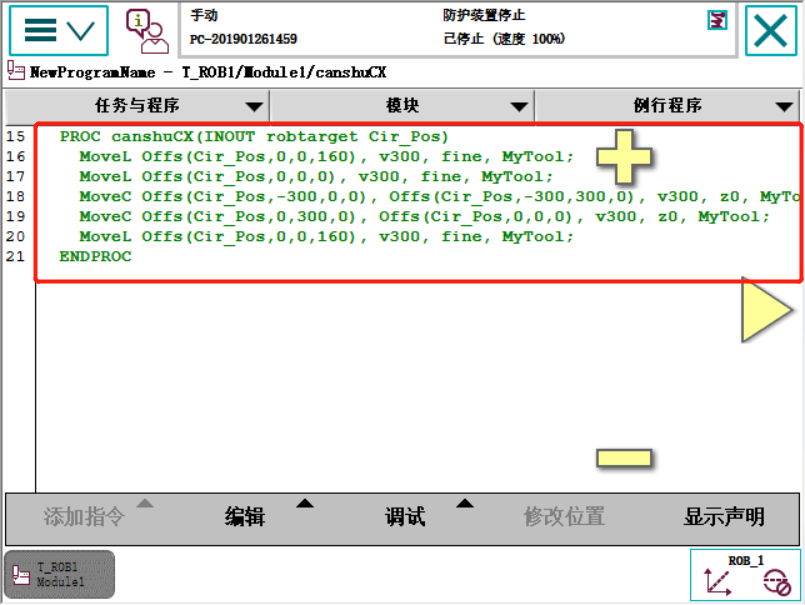
图3
(7)设定画圆的起始点,如图4所示:
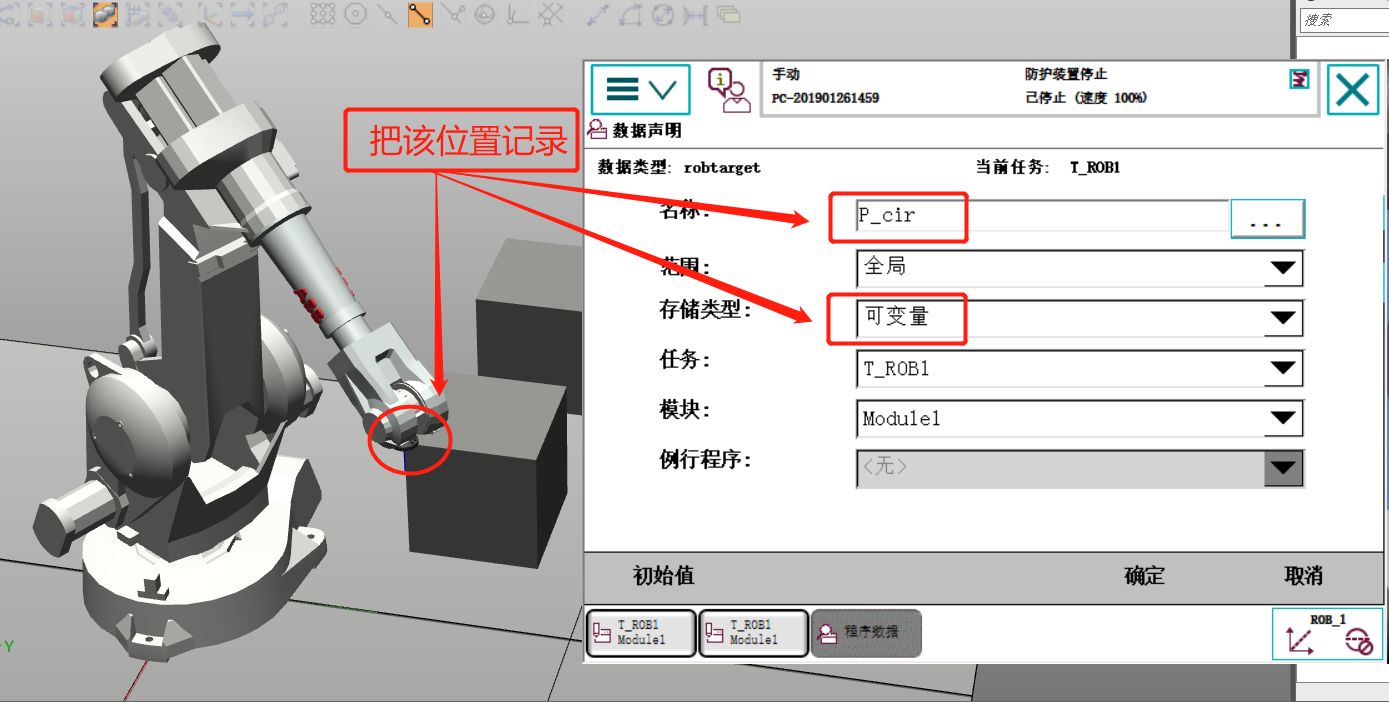
图4
(8)带参数的例行程序必须是调用,使用ProcCall进行调用,且需要输入参数;
(9)以下是本次案例程序;
MODULE Module1
PERS robtarget P_cir:=[[405.41,596.45,531.31],[0.390278,0.589646,-0.589646,0.390278],[0,0,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
!声明画圆开始点
PROC main() !主程序
canshuCX P_cir; !调用带参数例行程序
ENDPROC !程序结束语句
PROC canshuCX(INOUT robtarget Cir_Pos) !带参数例行程序
MoveL Offs(Cir_Pos,0,0,160), v300, fine, MyTool; !圆开始点上方位置
MoveL Offs(Cir_Pos,0,0,0), v300, fine, MyTool; !圆开始点位置
MoveC Offs(Cir_Pos,-300,0,0), Offs(Cir_Pos,-300,300,0), v300, z0, MyTool; !圆弧指令
MoveC Offs(Cir_Pos,0,300,0), Offs(Cir_Pos,0,0,0), v300, z0, MyTool;
!圆弧指令
MoveL Offs(Cir_Pos,0,0,160), v300, fine, MyTool; !圆开始点上方位置
ENDPROC !结束程序标志符
ENDMODULE
好啦,关于利用带参数例行程序画一个小圈圈就到此结束啦(●ˇ∀ˇ●)
看完本文后有以下任意情形之一的,请联系小编,可以预约现场解答:
1.看不懂图中的程序;
2.不懂图中的程序如何在示教上编写;
3.不懂RobotStudio软件的使用;
4.不会机器人的基本操作;
5.完全看不懂。
小编,在广东智通职业培训学院等你喔!
智通教育是东莞市专业的工业机器人培训机构,平时会不定期的在网站发布一些工业机器人课程相关的知识点,有兴趣的同学欢迎大家关注本网站!
上一篇:如何使用库卡机器人内部电磁阀
下一篇:ABB如何自己指定任务中的主程序

