相信很多童鞋对ABB机器人工件坐标系的创建都有所了解,但是对于创建方法中的用户方法和目标方法一知半解,有的老师上课的时候会简单的说:任选其中一种就可以了。如下图↓
那么他们有什么区别?两种方法同时选择可以吗?
如果任选其中一种方法,则创建的坐标系是一样的,robotstudio中可以通过生成的框架进行查看。
如果两种方法同时选择进行创建,也是可以的。此时创建的工件坐标同时包含了用户坐标系和目标坐标系
要理解这两点,我们要先了解世界坐标系(竖直安装的机器人可以以wobj0为参考)、用户方法创建的用户坐标系uframe 、目标方法创建的目标坐标系oframe 之间的关系。
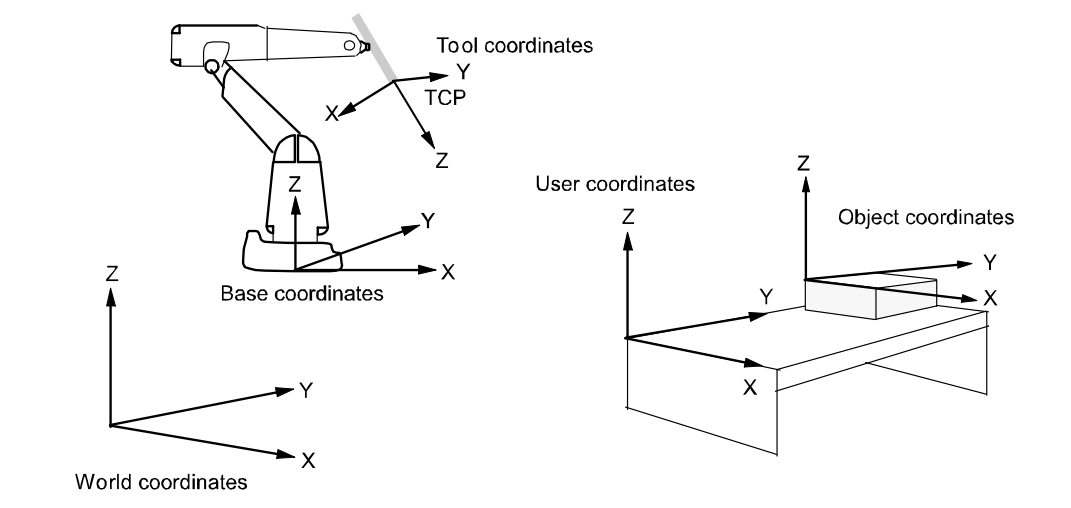
如果机械臂正夹持着工具,则在世界坐标系中定义用户坐标系(如果使用固定工具,则在腕坐标系中定义)。而目标坐标系是在用户坐标系中进行定义。如果只选择目标方法创建,则相当于在在世界坐标系中定义目标坐标系。
案例说明
PERS wobjdata wobj2 :=[ FALSE, TRUE, "", [ [300, 600, 200], [1, 0,0 ,0] ], [ [0, 200, 30], [1, 0, 0 ,0] ] ];
使用以下值来描述上图中的工件:
• 机械臂未夹持着工件。
• 使用固定的用户坐标系。
• 用户坐标系不旋转,且其在世界坐标系中的原点坐标为x=300、y=600和z=200
mm。
• 目标坐标系不旋转,且其在用户坐标系中的原点坐标为x=0、y=200和z=30mm。
所以,当用户坐标系原点值进行了改变,就算目标坐标系的值没有改变,目标坐标系的原点在空间中的位置也改变了。各位童鞋不妨试试看。
关于如何应用,大家也可以思考一下。也可以关注智通教育官微“玩转工业机器人”公众号了解更多。
智通教育是东莞市专业的工业机器人培训机构,平时会不定期的在网站发布一些工业机器人课程相关的知识点,有兴趣的同学欢迎大家关注本网站!

