东莞工业机器人培训哪家好?IRB360并联机器人程序注释和仿真运行
2022-05-19

1.1 主程序注释,东莞工业机器人培训哪家好?
PROC main()
inital1l;
WHILE TRUE DO
rPick1;
rPut1;
WaitTime 0.2;
ENDWHILE
ENDPROC
1.2 初始化注释
PROC inital1l()
count := 1;
count_all := 0;
Reset do1_xipan;
Reset do2_shangliao;
Reset do3_xialiao1;
Reset do4_xialiao2;
WaitDI di1_xipan, 0;
MoveJ pHome, v1000, z20, MyToolWObj:=wobj0;
ENDPROC
1.3 取料动作注释
PROC rPick1()
WaitDI di2_shangliao, 1;
MoveJ Offs(pPick1,0,0,100), v1000, z10, MyToolWObj:=wobj_pick1;
MoveL pPick1, v1000, fine, MyToolWObj:=wobj_pick1;
Set do1_xipan;
WaitTime 0.2;
WaitDI di1_xipan, 1;
GripLoad load1;
MoveL Offs(pPick1,0,0,100), v1000, z10, MyToolWObj:=wobj_pick1;
ENDPROC

PROC PutCal1()
TEST count
CASE 1:
pPut1 := Offs(pPutbase1,0,0,0);
CASE 2:
pPut1 := Offs(pPutbase1,202,0,0);
CASE 3:
pPut1 := Offs(pPutbase1,404,0,0);
CASE 4:
pPut1 := Offs(pPutbase1,606,0,0);
CASE 5:
pPut1 := Offs(pPutbase1,0,0,42);
CASE 6:
pPut1 := Offs(pPutbase1,202,0,42);
CASE 7:
pPut1 := Offs(pPutbase1,404,0,42);
CASE 8:
pPut1 := Offs(pPutbase1,606,0,42);
ENDTEST
ENDPROC
1.5 放料动作程序注释
PROC rPut1()
WaitDI di3_xialiao1, 1;
PutCal1;
MoveJ pGUODU, v1000, z50, MyToolWObj:=wobj0;
MoveJ Offs(pPut1,0,0,100), v1000, z50, MyToolWObj:=wobj_put1;
MoveL pPut1, v1000, fine, MyToolWObj:=wobj_put1;
Reset do1_xipan;
WaitTime 0.2;
WaitDI di1_xipan, 0;
GripLoad load0;
MoveL Offs(pPut1,0,0,100), v1000, z50, MyToolWObj:=wobj_put1;
MoveJ pGUODU, v1000, z50, MyToolWObj:=wobj0;
count := count + 1;
IF count > 8 THEN
count := 1;
count_all := count_all + 4;
Set do5;
PulseDOPLength:=0.6, do4_xialiao2;
WaitTime 0.8;
PulseDOPLength:=0.6, do4_xialiao2;
TPErase;
TPWrite "robot has working products number is count = "Num:=count_all;
WaitDI di2_shangliao, 1;
Reset do5;
ENDIF
ENDPROC
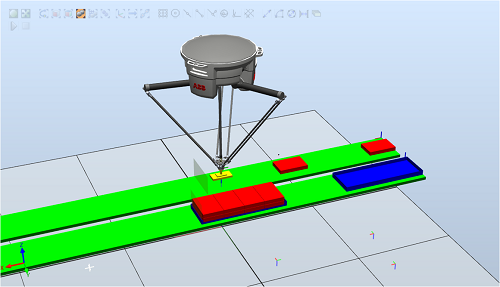
1.6 仿真图片
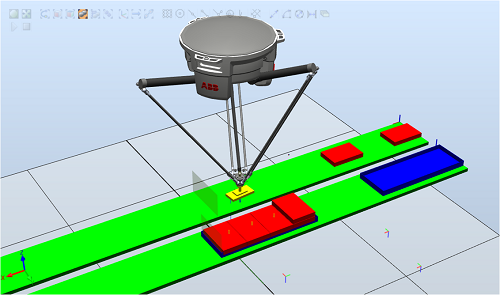
二、仿真运行
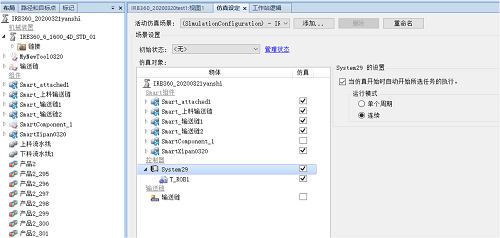
2.1 仿真设定
2.2 仿真运行
三、课程总结
3.1 总结
本文工业机器人培训专家带你了解了IRB360并联机器人程序注释和仿真运行。

想了解更多东莞工业机器人培训资讯?智通教育20年致力于东莞工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.

