MoveL指令——直线运动指令了解一下!
2021-04-21
MoveL指令,中文名称作直线运动指令,它可以使机械臂沿着直线轨迹运动。当TCP在轨迹的起点与TCP在终点的姿态不一致时,运动过程中TCP由起点姿态均匀向终点姿态过渡。TCP保持固定时,即起点与终点重合时,则该指令亦可用于调整工具姿态。
关于MoveL指令的指令格式,东莞工业机器人培训专家介绍如下:
MoveL ToPoint,Speed,Zone ,Tool ;
1)MoveL指令代码
2)ToJointPos运动目标点,存储一个位置数据
3)Speed移动速度
4)Zone转弯半径
5)tooL工具编号
例:MoveL p5, v2000, fine, grip3;
工具grip3的TCP沿直线运动至目标点p5,运动速度为系统预定义的Speeddata数据V2000,不使用转弯半径过渡,精确到达目标点。
直线运动指令的运动轨迹示意,如图4-82所示:
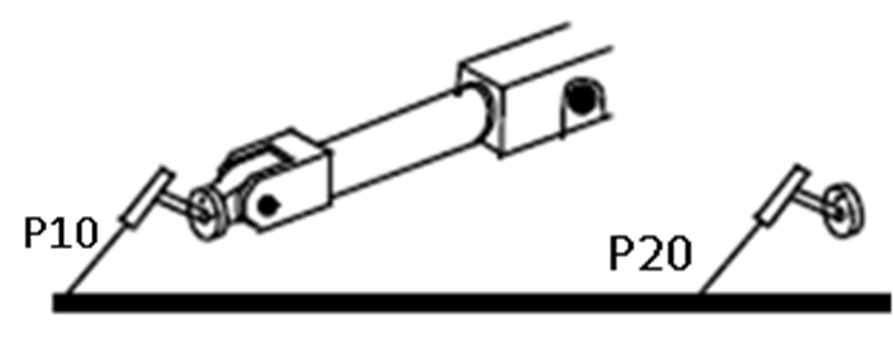
图4-82
无论哪一品牌的工业机器人,可使用的运动指令都是有限的,一般只有3~6条运动指令可以使用。当遇到复杂的运动轨迹时,通常是没有现成的轨迹运动指令可用的,这时候我们可以将复杂的运动轨迹切割成多段小直线轨迹,切割的段数越多对复杂轨迹的再现也就越精确。
MoveJ指令与其他运动指令一样,有可选变量可供使用。一些常用的可选变量的具体将在后续章节予以介绍,可选变量的启用与停用操作步骤请参考“4.3.1创建我的第一个RAPID程序”这一章节。
关于MoveL指令的指令格式,东莞工业机器人培训专家介绍如下:
MoveL ToPoint,Speed,Zone ,Tool ;
1)MoveL指令代码
2)ToJointPos运动目标点,存储一个位置数据
3)Speed移动速度
4)Zone转弯半径
5)tooL工具编号
例:MoveL p5, v2000, fine, grip3;
工具grip3的TCP沿直线运动至目标点p5,运动速度为系统预定义的Speeddata数据V2000,不使用转弯半径过渡,精确到达目标点。
直线运动指令的运动轨迹示意,如图4-82所示:
图4-82
无论哪一品牌的工业机器人,可使用的运动指令都是有限的,一般只有3~6条运动指令可以使用。当遇到复杂的运动轨迹时,通常是没有现成的轨迹运动指令可用的,这时候我们可以将复杂的运动轨迹切割成多段小直线轨迹,切割的段数越多对复杂轨迹的再现也就越精确。
MoveJ指令与其他运动指令一样,有可选变量可供使用。一些常用的可选变量的具体将在后续章节予以介绍,可选变量的启用与停用操作步骤请参考“4.3.1创建我的第一个RAPID程序”这一章节。
想了解更多机器人培训资讯?智通教育(www.xue5156.com)20年致力于工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.

