什么是MoveJ指令?机器人培训的老师在本文为您详解!
2021-04-20
什么是MoveJ指令?东莞自动化培训专家解释说,“MoveJ指令,中文名称作关节运动指令,它可以使机械臂沿非线性路径运动至目标位置。到达目标位置时,所有轴均同时达到。当无需精确控制运动轨迹时,使用MoveJ指令可比使用其他指令更迅速地将机械臂迅速地从一点移动至另一点。使用MoveJ指令编程时,点到点之间的轨迹由机器人控制器计算生成,编程人员不易预见机器人的运动轨迹。”
MoveJ指令的指令格式如下:
MoveJ ToPoint,Speed,Zone,Tool;
1)MoveJ指令代码
2)ToJointPos运动目标点,存储一个位置数据
3)Speed移动速度
4)Zone转弯半径
5)tooL工具编号
例:MoveJ p1, vmax, z30, tool2;
将工具的工具中心点tool2沿非线性路径移动至位置p1,其速度数据为用户预定义的speeddata型数据vmax,且转角半径数据为z30。
关节运动指令的运动轨迹示意,如图4-81所示:
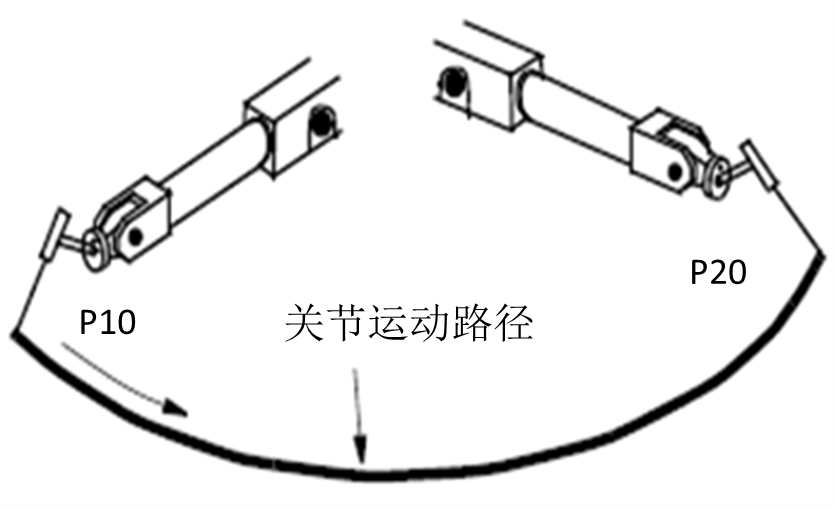
图4-81
MoveJ指令与其他运动指令一样,有可选变量可供使用。一些常用的可选变量的具体将在后续章节予以介绍,可选变量的启用与停用操作步骤请参考“4.3.1创建我的第一个RAPID程序”这一章节。
MoveJ指令的指令格式如下:
MoveJ ToPoint,Speed,Zone,Tool;
1)MoveJ指令代码
2)ToJointPos运动目标点,存储一个位置数据
3)Speed移动速度
4)Zone转弯半径
5)tooL工具编号
例:MoveJ p1, vmax, z30, tool2;
将工具的工具中心点tool2沿非线性路径移动至位置p1,其速度数据为用户预定义的speeddata型数据vmax,且转角半径数据为z30。
关节运动指令的运动轨迹示意,如图4-81所示:
图4-81
MoveJ指令与其他运动指令一样,有可选变量可供使用。一些常用的可选变量的具体将在后续章节予以介绍,可选变量的启用与停用操作步骤请参考“4.3.1创建我的第一个RAPID程序”这一章节。
想了解更多机器人培训资讯?智通教育(www.xue5156.com)20年致力于工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.

